|
1. Описание устройства "мозгов" KK Controller Board Version 5.5 на микропроцессоре Atmega168PA
Чтобы добиться стабильного полета при воздействии на летательный аппарат различных внешних факторов, например ветра или д.р. необходимо задействовать систему управления, включающую в себя как минимум три гироскопа, микроконтроллер для обработки поступающих в реальном времени сигналов и систему коммутации с приемником RC для внешнего управления мультикоптером. Плата управления для радиоуправляемых моделей квадрокоптеров и мультикоптеров KK-Board V5.5 (сокращенно "мозги") полностью соответствует всем этим требованиям и предназначена для стабилизации аппарата во время полета. Сигналы от трех независимых гироскопов (ROLL - крен, Pitch - тангаж и YAW - рыскание) поступают в микроконтроллер Atmega168. Микроконтроллер обрабатывает эти сигналы с высокой скоростью и согласно установленному программному обеспечению формирует и выдает специальные цифровые сигналы управления для всех регуляторов оборотов моторов (Electronic Speed Controllers - ESC).
Благодаря такому электронному управлению скоростью вращения пропеллеров и достигается хорошая стабилизация модели мультикоптера в полете.
Плата управления KK-Board также обрабатывает сигналы получаемые от внешней аппаратуры управления находящейся в руках у оператора осуществляющего непосредственное удаленное управление по радиоканалу RC (радиоприемник (RX) устанавливается на борту мультикоптера) и передает их в микропроцессор Atmega168 через специальные входы на плате управления ( Aileron - элероны, Elevator – руль высоты, Throttle - газ и Rudder – руль направления ). Как только эта информация обработана, микроконтроллер формирует сигналы для ESC. Таким образом регулируется скорость вращения каждого двигателя, чтобы сделать полет управляемым, но при этом стабильным во всех направлениях ( вверх, вниз, назад, вперед, влево, вправо, развороты в любую сторону ).
Плата управления и стабилизации полета KK-Board является универсальным устройством управления и подходит для различных летательных аппаратов и роботизированных летающих платформ использующих различное количество двигателей. Возможно перенастроить плату управления для управления как тремя моторами трикоптер (англ. Tricopter ) так и Суперкоптером с шестью двигателями гексокоптер ( англ. Hexcopter ). В этом описании мы будем подробно рассматривать вариант настройки и регулировки для наиболее распространенной четырех моторной летающей платформы называемой Квадрокоптер он же квадролёт, четырёхроторный вертолет ( англ. Quadrotor или Quadrocopter ).
На изображении показан внешний вид платы управления мультикоптером KK-Board, где сносками обозначены все основные элементы платы управления, вводы сигнала приемника, выводы на 6 регуляторов хода ESC, потенциометры для точной регулировки гироскопов (вращение против часовой стрелки увеличивает чувствительность и наоборот вращение потенциометров по часовой стрелке уменьшает чувствительность гироскопов), а также место расположение белой стрелки (Вперед - Forward).
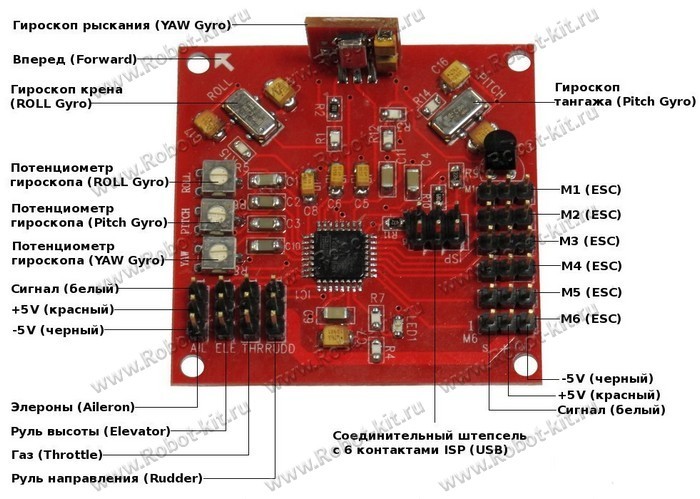
На плате управления KK-Board применяются пьезоэлектрические гироскопы фирмы Murata, которые менее чувствительны к вибрации, чем аналоги, но, несмотря на это, мы рекомендуем установить плату управления на специальных ножках из виброгасящего материала.
Плата контроллера управления полетом KK-Board должна быть установлена белой стрелкой по направлению движения (Вперед - Forward).
2. Установка
2.1 Подключение приемника для дистанционного управления
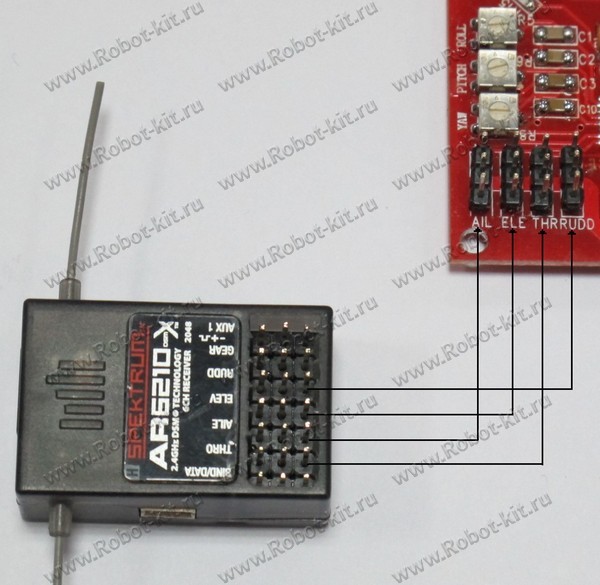
Соединяя Ваш радиоприёмник (RX), Вы должны соединить сигнальные выводы Signal (White) каналов (CH1, CH2, CH3 и CH4) соответственно с каналами AIL (Aileron) - элероны, ELE (Elevator) – руль высоты, THR (Throttle) - газ и RUDD (Rudder) – руль направления, красные (+5V(Red) - питание) провода с центральными выводами, а черные провода (Black) - земля) с крайними выводами. В общем случае необходимо соединить все канала правильно.
Приемники Спектрум (Spektrum) AR6110 DSM2, AR6115 DSMX, AR6115e DSMX, AR6210 DSMX и др. имеют буквенное обозначение каналов, что облегчает подключение к плате.
Соединение каналов на плате KK-Board и приемнике Спектрум (Spektrum) AR6210 DSMX представлены на фото внизу.
2.2 Подключение регуляторов хода ESC
На используемых Вами регуляторах хода ESC необходимо отключить отсечку регулятора по разряду батареи ( для аккумуляторов LiPo ). Если это невозможно по объективным причинам, то необходимо обязательно выставить отсечку на ESC как для аккумуляторов типа металлгидрид NiMh, чтобы предотвратить отключение одного или нескольких моторов из-за срабатывания отсечки в ваших регуляторах хода во время полета. При этом необходимо обязательно использовать сигнализаторы разряда батарей LiPo, индикаторы напряжения либо летать строго по таймеру.
Для регуляторов хода ESC с опторазвязкой (серии OPTO):
Разъёмы, обозначенные от M1 до M6, соединяются с трёхпроводными выводами BEC регуляторов хода ESC по тому же правилу, как и приёмник: сигнал - сигнал, питание – питание, земля - земля.
Для регуляторов хода ESC без опторазвязки:
Необходимо обязательно отключить все контакты + (красный) подающие питание из регуляторов хода на плату KK-Board, кроме одного. Таким образом, только ОДИН из регуляторов хода ESC будет соединен тремя проводниками: сигнал - сигнал, питание – питание, земля - земля. Все другие остающиеся регуляторы, не имеющие опторазвязки, должны быть подсоединены к плате управления KK-Board без красного плюсового контакта.
2.3 Установка платы управления KK-Board для конфигурации крест
Вариант полета крестом "+" Program ( Конфигурация крест "+" ) представлен на Рис. 2
Зеленая стрелка на схеме указывает направление стрелки направления полета (Вперед - Forward) на плате управления KK-Board. Для конфигурации "+" стрелка (Вперед - Forward) указывает точно на двигатель M1.
Регуляторы хода ESC с двигателями M1 - M4 подключаются по схеме:
M1 - регулятор хода, передний мотор (по часовой стрелке)
M2 - регулятор хода, левый мотор (против часовой стрелки)
M3 - регулятор хода, правый мотор (против часовой стрелки)
M4 - регулятор хода, задний мотор (по часовой стрелке)
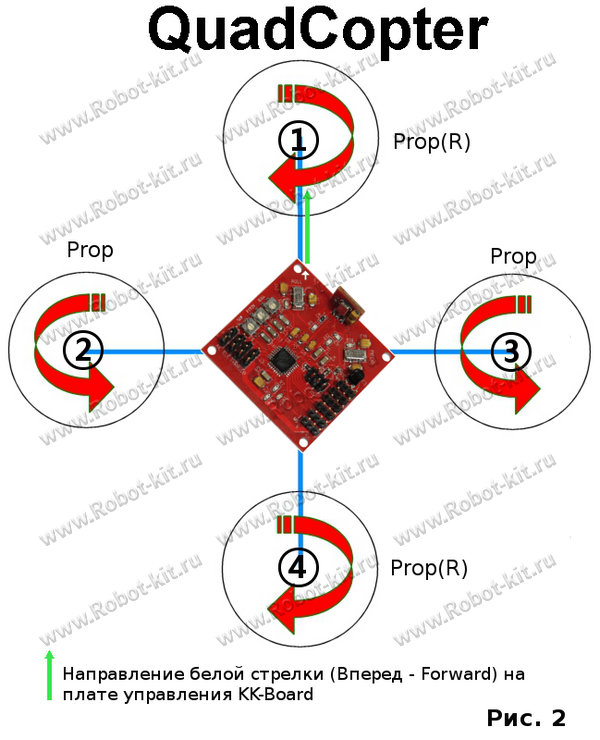
Prop – пропеллер прямого вращения (против часовой стрелки)
Prop (R) — пропеллер обратного вращения (по часовой стрелке)
3. Настройка платы управления KK-Board
3.1 Включение (разблокировка приемника)
Включаем передатчик. Подаем питание на квадрокоптер. Светодиод на плате управления квадрокоптера НЕ должен гореть. Мультикоптер при этом НЕ будет реагировать на команды передатчика. Это нормально!
Всегда подавайте питание на квадрокоптер после включения передатчика. Это Важно!
Положение рукоятки управления газа на передатчике при включении должно быть на минимуме при этом светодиод LED на плате управления KK-Board должен загореться и погаснуть этот сигнал будет характеризовать правильную работу платы управления. Так и должно быть.
Для правильной разблокировки канала газа необходимо удерживать левую ручку управления на передатчике в крайнем нижнем правом положении в течение 2 секунд, если при этом светодиод LED загорелся, то разблокировка канала управлением оборотами завершена правильно. Если разблокирования канала газа не произошло, то необходимо опустить триммер канала дросселя, и затем снова произвести снятие блокировки с канала газа, правильно повторив последовательность всех действий, как описано выше.
3.2 Установки диапазонов ATV/servo передатчика
Для Pitch (Elevator) на 50%
Для Roll (Aileron) на 50%
Для Yaw (Rudder) на 100%
3.3 Калибровка регуляторов оборотов ESC
Функция настройки платы управления мультикоптером предназначена для регулировки регуляторов оборотов ( ESC ) и проверки готовности двигателей. Из-за вероятной ошибки при подключении нескольких двигателей к плате управления всегда проводите дополнительное тестирование системы перед взлетом.
Настройка платы управления мультикоптером KK V5.5 осуществляется при помощи трех потенциометров, у которых есть две функции для различного применения:
Если любой из трех потенциометров или все три потенциометра будут выставлены на минимальном значении, то плата управления мультикоптером перейдет в режим настройки ESC и моторов, сбросив все предварительные настройки на заводские после выключения питания, когда регулировка будет завершена.
Вращение потенциометров по часовой стрелке приводит к уменьшению чувствительности, а вращение потенциометров против часовой стрелки приводит к увеличению чувствительности.
3.4 Проверка каналов передатчика
Снимите пропеллеры.
Установите ручку газа на ноль (на передатчике левая назад до упора), включите передатчик (TX) и квадрокоптер.
Активируем двигатели для ( Mode 2 ) газ в минимум, руль поворота вправо до упора.
Должен загореться красный светодиод, сигнализирующий о готовности платы к полёту. До этого момента моторы не включатся (исключение - режим калибровки газа).
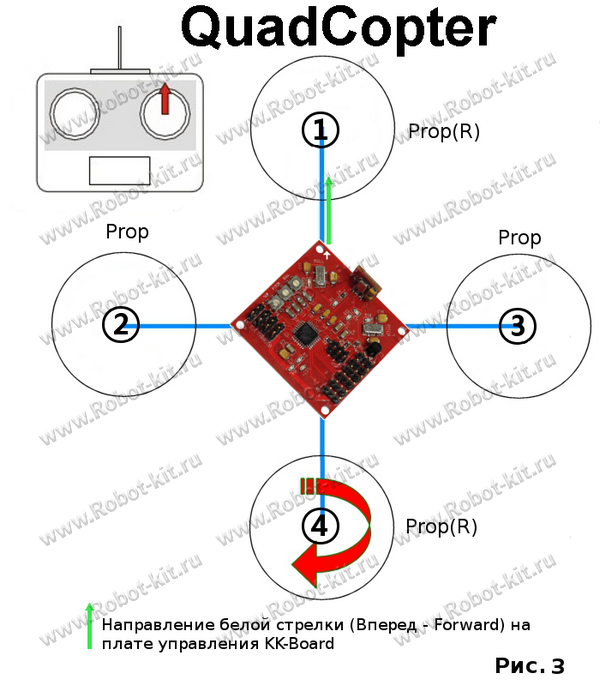
Переместите ручку руля высоты вперед (на передатчике правая ручка), смотри Рис. 3.
Задний по направлению полёта двигатель должен увеличить обороты. В противном случае реверсируйте канал Pitch ( Elevator ).
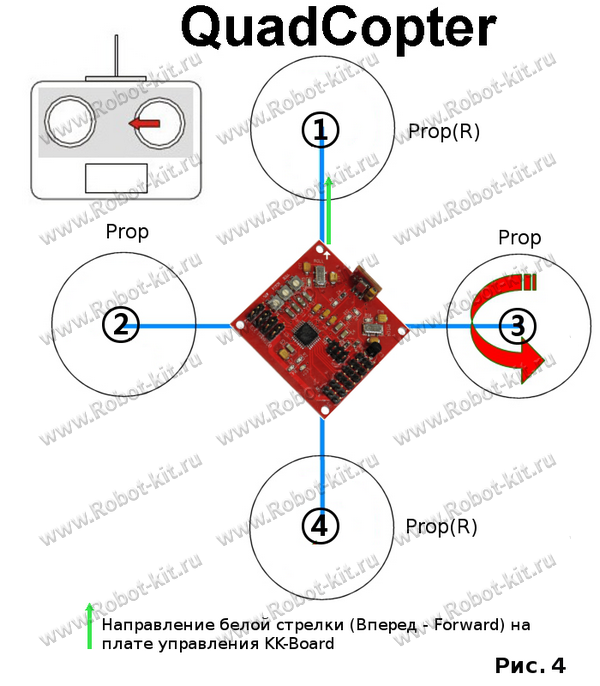
Переместите ручку элерона налево (на передатчике правая ручка), смотри Рис. 4.
Правый двигатель должен увеличить обороты. В противном случае реверсируйте канал ROLL ( Aileron ).
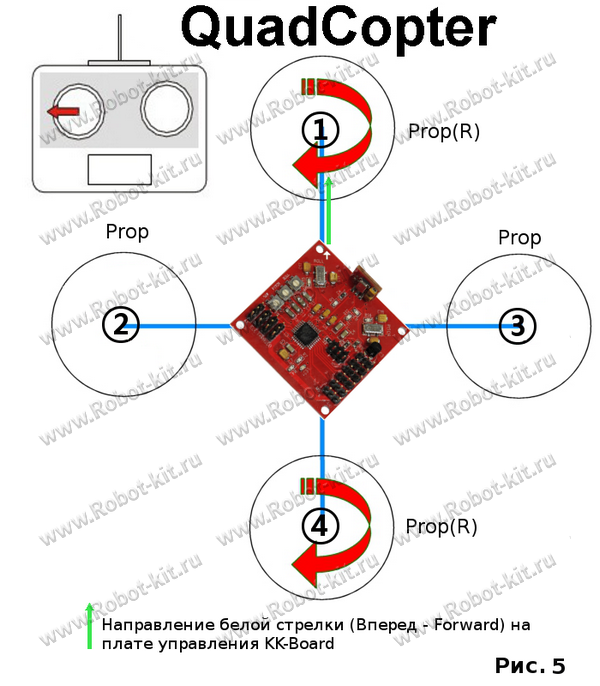
Переместите ручку руля направления налево (на передатчике левая ручка), смотри Рис.5.
Передний M1 и задний M4 двигатели должны увеличить обороты. В противном случае реверсируйте канал YAW (Rudder).
3.5 Калибровка потенциометров
Поверните три потенциометра YAW, Pitch, ROLL на "0" (по часовой стрелке до упора), как показано на Рис. 6.
Подключите питание и ждите в течение нескольких секунд.
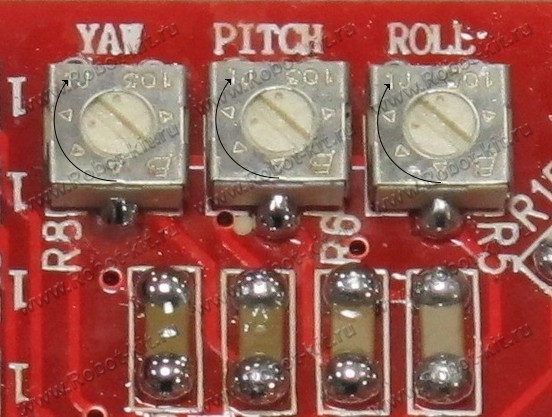
Рис. 6
После завершения инициализации, выключите питание и поверните три потенциометра в нормальное положение (обычно это среднее положение потенциометра), смотри Рис. 7.
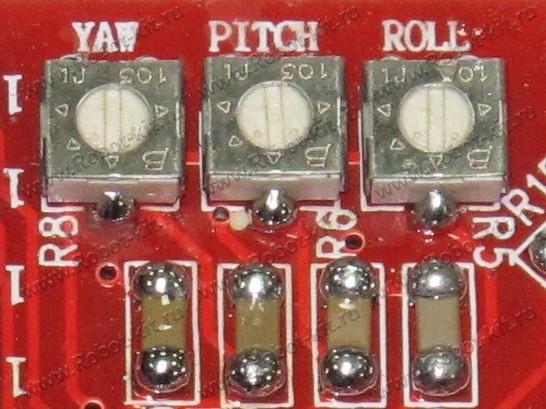
Рис. 7
3.6 Проверка установок гироскопов для KK-Board
Снимите пропеллеры со всех моторов.
Включите передатчик затем квадрокоптер.
Установите ручку газа примерно на 1/4. Двигатели должны запуститься.
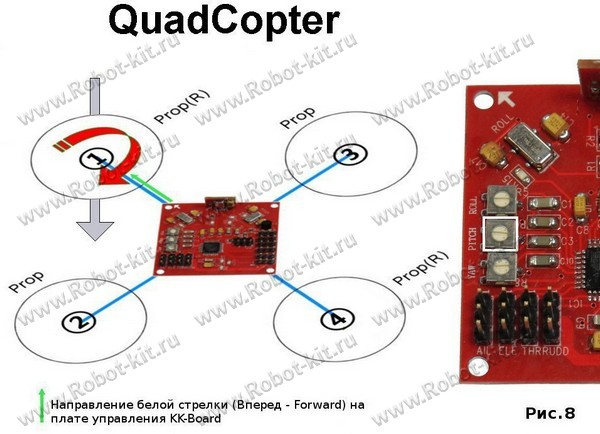
Наклоните квадрокоптер вперед, смотри Рис. 8 (серая стрелка вниз).
Передний двигатель M1 должен увеличить обороты, компенсируя внешнее воздействие. В противном случае реверсируйте гироскоп тангаж (Pitch Gyro).
Наклоните квадрокоптер налево, смотри Рис. 9 (серая стрелка вниз).
Левый двигатель M2 должен увеличить обороты, компенсируя внешнее воздействие. В противном случае реверсируйте гироскоп крена (ROLL Gyro).

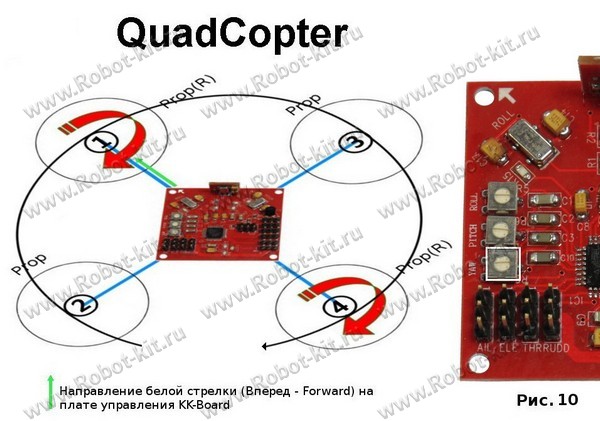
Поверните квадрокоптер в горизонтальном положении по часовой стрелке, смотри Рис.10.
Передний M1и задний M4 двигатели должны увеличить обороты вращения компенсируя тем самым внешнее воздействие. В противном случае реверсируйте гироскоп рыскания (YAW Gyro).
3.7 Реверсирование каналов гироскопов на плате KK-Board
Перед включением установите потенциометр ROLL Gyro на ноль (по часовой стрелке до упора).
Включите передатчик и подключите квадрокоптер, подав питание на плату управления.
Переместите ручку передатчика соответствующую гироскопу, который Вы хотите реверсировать.
Правая влево/вправо CH1 - Aileron – элероны Roll - крен
Правая вперёд/назад CH2 - Elevator - руль высоты Pitch - тангаж
Левая влево/вправо CH4 - Rudder - руль направления Yaw - рыскание
Светодиод станет мигать непрерывно.
Выключите квадрокоптер.
Выполните эти действия последовательно для всех гироскопов, которые необходимо реверсировать, после чего верните потенциометр ROLL Gyro в изначальное положение.
Важно!
За одно включение можно реверсировать только один канал.
3.8 Финальная проверка перед полетом
Поставьте квадрокоптер на землю, отойдите на безопасное расстояние и медленно увеличивайте газ до момента отрыва. Надо подождать некоторое время, прежде чем прибавлять газ потому, что предстартовая калибровка гироскопов происходит при убранном газе в состоянии покоя аппарата.
Если квадрокоптер начинает вращаться, проверьте пропеллеры и направления вращения моторов, если появляется раскачивание (автоколебания), то необходимо немножко уменьшить чувствительность гироскопов затем повторить попытку и если автоколебания не исчезли еще немного уменьшить чувствительность, вращая потенциометры по часовой стрелке уменьшая чувствительность очень маленькими шагами. Несильное вращение вокруг своей оси считается допустимым и объясняется скольжением аппарата в создаваемых им же турбулентных потоках воздуха, а от автоколебаний (раскачивания) необходимо избавиться, уменьшая чувствительность гироскопов.
Попробуйте повернуть квадрокоптер рукой. Вы должны почувствовать сопротивление Вашим действиям. Чем больше чувствительность гироскопа, тем больше будет ощущаться сопротивление вашим действиям. Но если обнаружатся автоколебания, то чувствительность гироскопов необходимо уменьшить (вращение потенциометров по часовой стрелке). Старайтесь не уменьшать чувствительность гироскопов ниже 40%.
Изменять чувствительность гироскопов с помощью потенциометров на плате контролера KK-Board производя настройку стабильного полета необходимо буквально по миллиметрам.
Замечание:
Как правильно взлететь?
1: Сначала квадрокоптер и его пропеллеры должны быть неподвижными.
2: Авто-калибровка гироскопов завершается при убранном полностью газе.
3. Затем увеличьте (коллективный) газ и взлетайте.
4: Не забывайте быстро убирать газ на минимум, если Вы теряете контроль над аппаратом: повреждения при падении с выключенным газом будут намного меньше.
Важно: Не используйте в конструкции мультикоптера пропеллеры максимально допустимые по размеру и шагу исходя из указанных в характеристиках выбранных вами моторов. Всегда лучше использовать пропеллеры меньшего диаметра и шага это дает более быстрый отклик на управление и также добавляет больше стабильности. Иными словами моторы должны изменять обороты почти мгновенно реагируя на сигналы получаемые от платы управления полетом KK-Board (это происходит независимо от дистанционного управления) поэтому моторы, получая сигнал от платы управления, должны реагировать быстро, а установка больших пропеллеров с большим шагом замедляет раскрутку мотора, что в результате приводит к тому что моторы просто не успевают за работой гироскопов и микропроцессора Atmega168PA на плате управления KK-Board. По этой же причине желательно выбирать регуляторы хода ESC для бесколлекторных двигателей с высокой частотой сигнала (не ниже 400 Гц).
Активное управление должно производиться в среднем положении газа (1/3 - 2/3 хода ручки). Добиться этого можно варьируя больший или меньший диаметр и шаг используемых пропеллеров, а также подбирая для постройки мультикоптера бесколекторные моторы с различной величиной KV (обороты на вольт) или подбирая аккумуляторы LiPo с большим или меньшим количеством банок.
Плата управления полетом KK-Board V5,5 может заставить летать любую модель квадрокоптера (черыре мотора) или гексокоптера (шесть моторов) как крестом " + " QuadroCopter, так и иксом " X " X-Copter. Также возможно перепрограммировать плату для полета на трикоптере ( TriCopter ).
 Посмотреть/cкачать инструкцию на русском языке по установке и настройке платы управления мультикоптером KK-Board V5.5 (формат PDF, размер 1 МБ) => Посмотреть/cкачать инструкцию на русском языке по установке и настройке платы управления мультикоптером KK-Board V5.5 (формат PDF, размер 1 МБ) =>
|













")





")

")
")